INTERFAZ MATLAB SIMULINK CON SOLIDWORKS
Pasos:
1) Primero nos dirigimos a:
https://www.mathworks.com/products/simechanics/download_smlink.html

3) Procedemos a abrir el programa Matlab y digitamos lo siguiente:
y se abrirá nuevamente el matlab, lo cerramos al nuevo matlab que se ha abierto.
6) Realizamos el linkeo de matlab con simulink digitando esto en matlab:
> smlink_linksw
y nos dará un mensaje de que todo ha ido bien

7) Es hora de abrir solidworks y nos dirigimos a:
- SIMMECANICS LINK

COMPROBACIÓN CON UN EJEMPLO PARA VERIFICAR LO REALIZADO.
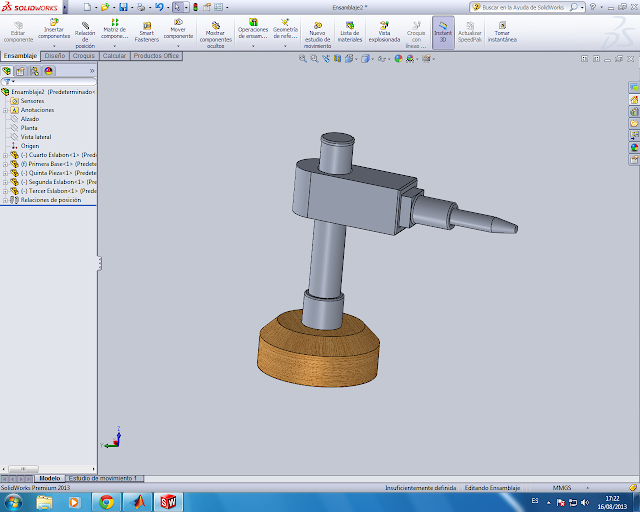
Realizamos un pequeño ensamblaje de 3 gdl
puedes bajarlo aquí
Para enviar este brazo a matlab debemos ir a:
A continuación les indicaré como interlazar el SolidWorks con Matlab, de cualquier versión.
Pasos:
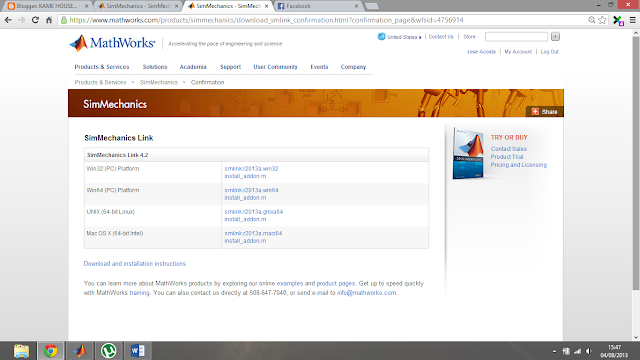
1) Primero nos dirigimos a:
https://www.mathworks.com/products/simechanics/download_smlink.html

2) Nos registramos en la página en caso de pedir y nos bajamos archivo simMechanics correspondiente a nuestra versión. Nos direccionará a otra página donde nos bajaremos los siguientes archivos para nuestra version de matlab instalado:

(la descarga de estos archivos es aproximadamente de 10 min, dependiendo de tu banda)
install_addon.m
smlink.2013a.win32 (depende de tu versión de matlab, en mi caso es este)
Al bajarte estos archivos, de preferencia colócalos en la carpeta de MATLAB creada en mis documentos
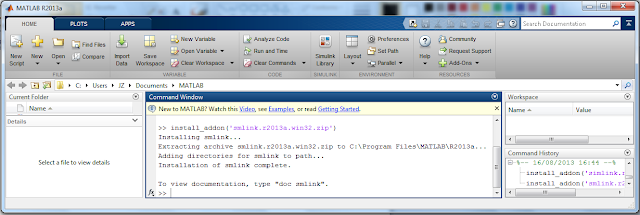
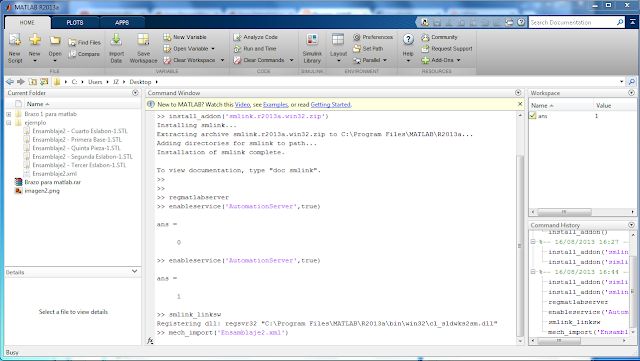
3) Procedemos a abrir el programa Matlab y digitamos lo siguiente:
> install_addon('smlink.r2013a.win32.zip')
(si sale error debemos verificar si el zip descargado no esta corrompido, caso contrario no podremos continuar con la instalación)
Si esta correcto nos saldrá esto:

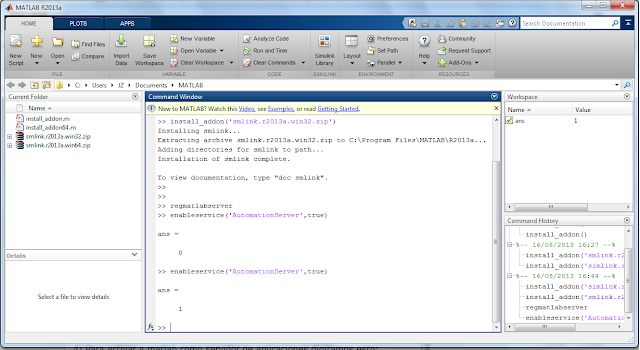
4) Para activar a matlab como servidor de aplicaciones digitamos esto:
> regmatlabserver
esperamos un momento hasta que responda el sistema y luego digitamos:
> enableservice('AutomationServer',true) (repetimos esta acción hasta obtener ans = 1)

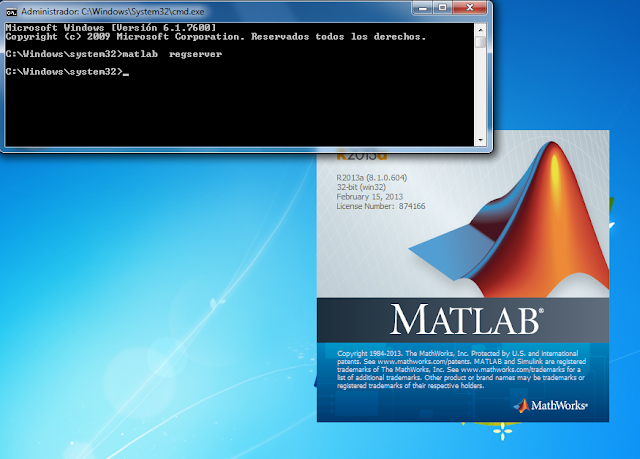
5) Ahora nos dirigimos al cmd de windows y lo digitamos como admin y digitamos:
> regmatlab server

y se abrirá nuevamente el matlab, lo cerramos al nuevo matlab que se ha abierto.
6) Realizamos el linkeo de matlab con simulink digitando esto en matlab:
> smlink_linksw
y nos dará un mensaje de que todo ha ido bien

7) Es hora de abrir solidworks y nos dirigimos a:
Herramientas> Complementos y activamos las dos casillas de este complemento ubicado al final de la ventana:
- SIMMECANICS LINK

COMPROBACIÓN CON UN EJEMPLO PARA VERIFICAR LO REALIZADO.
Realizamos un pequeño ensamblaje de 3 gdl

puedes bajarlo aquí
Para enviar este brazo a matlab debemos ir a:
Simmechanics link> exportr> SimsMechanicsFirstgeneration
e indicamos en el lugar donde guardarlo


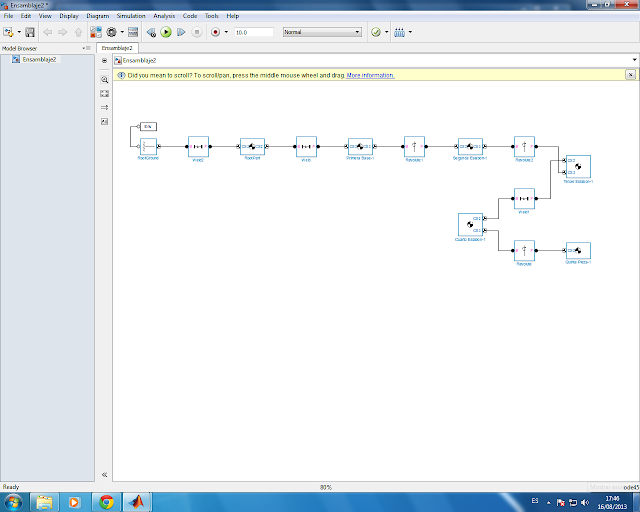
8) Para abrirlo ingresamos a matlab y digitamos:
mech_import('Ensamblaje2.xml')
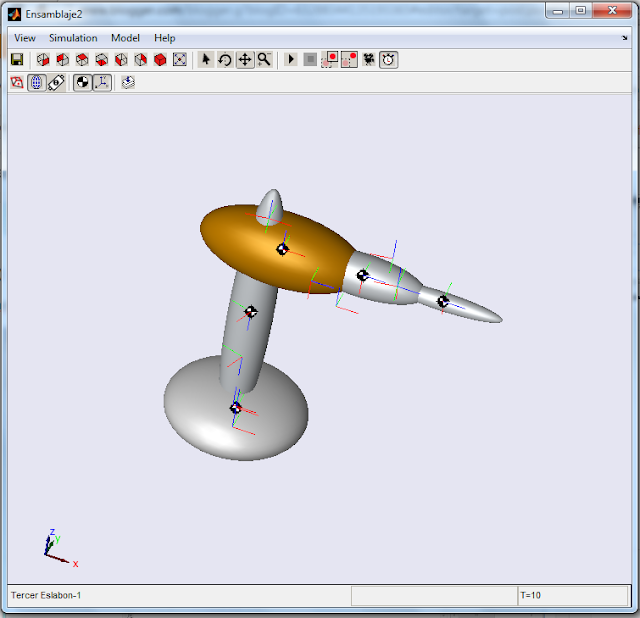
y tenemos la representación en simulink del brazo:
descarga el archivo Ensamblaje2.xml aquí
e indicamos en el lugar donde guardarlo

Se demorará un poco dependiendo del ordenador porque se creará los archivos correspondientes para matlab de cada pieza realizada y del ensamblaje
El archivo para abrir en matlab se te guardará con extensión .xml en mi caso se llama "Ensamblaje2.xml"

8) Para abrirlo ingresamos a matlab y digitamos:
mech_import('Ensamblaje2.xml')

y tenemos la representación en simulink del brazo:


descarga el archivo Ensamblaje2.xml aquí

















: )
ResponderEliminarExcelente explicación.Gracias por el buen aporte.
ResponderEliminar